Für die berührungslose Erfassung und Registrierung von 3D Objekten wurden in den letzten Jahren verschiedene Verfahren entwickelt, die jedoch meist hohe Anforderungen an die notwendigen Hardwarekomponenten stellen. In dieser Masterarbeit war es das Ziel, einen Ansatz* zu realisieren, der unter Verwendung einer Kamera und eines handgeführten Lasers die 3D Erfassung von Oberflächen beliebiger 3D Objekte ermöglicht. Dieser bietet eine kostengünstige Alternative verglichen mit den relativ teuren kommerziellen Systemen in diesem Anwendungsbereich an.
*Literatur: S. Winkelbach, S. Molkenstruck, F.M. Wahl, Low-Cost Laser Range Scanner and Fast Surface Registration Approach, DAGM-2006, 718-728
|
|
|
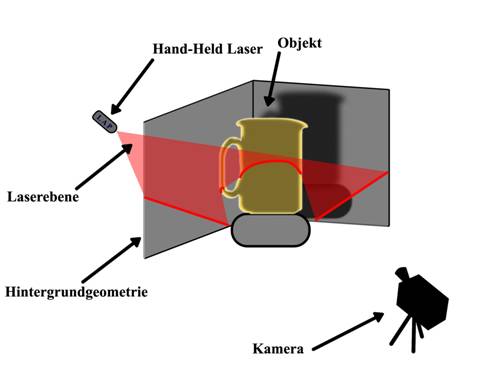
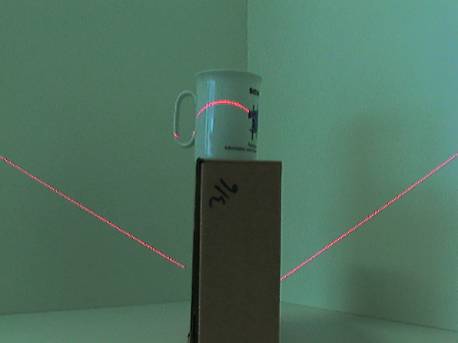
In diesem Ansatz stellt man das zu scannende Objekt vor eine Raumecke, oder vor zwei Ebenen, die im rechten Winkel zueinander stehen, und richtet die Kamera auf diese Szene aus. Der Laser muss eine gut sichtbare Linie in die Szene projizieren, während die Kamera Bilder über das so beleuchtete Objekt für den Rechner aufnimmt. Im Gegensatz zu anderen Lösungen wird hier zur Bewegung des Lasers keine aufwendige Mechanik oder eine aufwendige Aufzeichnung der Bewegungstrajektorie benötigt, zum Scannen nimmt man ihn einfach in die Hand und lässt die Linie manuell über das Objekt wandern. Zu diesem Zweck eignet sich ein einfacher handelsüblicher Linienlaser, was das Licht auf eine Ebene ausstrahlt, und so entsteht beim Schneiden mit Gegenständen immer eine Linie. Bezüglich der Kamera bestehen keine weiteren Voraussetzungen.
Das Verfahren basiert darauf, dass die durch den Laser beleuchteten Objektpunkte im Bild segmentierbar sind, und ihre 3D Koordinaten sind bei bekannter Laserebene mittels 3D Triangulation berechenbar. Man muss also zuerst die Parameter der Laserebene bestimmen. Dazu wird im Bild nach Kanten gesucht, die mit großer Wahrscheinlichkeit dem Schnitt der Laserebene mit dem rechtwinkligen Hintergrund entsprechen. Dabei ist es natürlich wichtig, dass der Laser während des Scannens nicht nur das Objekt, sondern auch den Hintergrund beleuchtet. Zur Kantenfindung wird das Ransac Verfahren auf einem geeignet binarisierten Bild eingesetzt. Sind dann die äußeren und inneren Kameraparameter auch noch bekannt, und stehen weiterhin auch die Parameter des Hintergrunds zur Verfügung, so ist die Bestimmung der Laserebene aus 3 oder mehr Punkten und dadurch die Aufstellung der Ebenengleichung möglich. Die Kameraparameter braucht man dazu, wahre 3D Punkte zu einem gewünschtem 2D Punkt im Messbild zu finden. Die möglichen Punkte liegen immer auf einer Gerade, die durch den Kamerahauptpunkt läuft.
Nach dem Aufbauen der Szene ist als Initialisierungsschritt die Kamerakalibrierung durchzuführen, und zusätzlich muss die Hintergrundgeometrie definiert werden. Diese Maßnahmen sind jedoch nur einmal nötig. Um die Kalibrierung des Lasers (d. h. die Berechnung der jeweiligen Orientierung und Position der Laserebene) muss sich der Benutzer nicht kümmern.
|
|
|
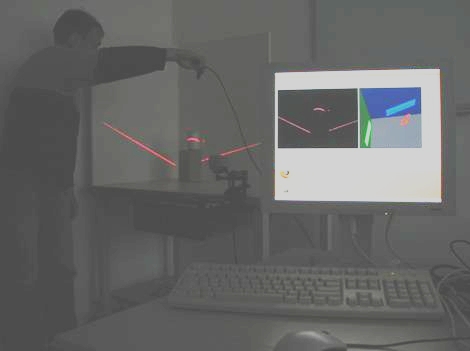
Die entstandene Software bietet Hilfsmittel zur Kamerakalibrierung an, und sie ermöglicht neben der Objekterfassung in Echtzeit eine Möglichkeit auch auf off-line Bildauswertung im Fall von vorher aufgenommenen Bildserien. Bei beiden Varianten sind die Ergebnisse in einem Fenster am Bildschirm des Computers in Echtzeit sichtbar, wodurch der Anwender das Ergebnis stetig sehen und kontrollieren kann, und er kann mit dem Scannen solange fortfahren, bis er zufrieden mit dem Modell ist. Die Daten können außerdem auch in eine Textdatei gespeichert werden, was als Eingabe anderer Programme (z. B. Matlab, Mathematica) dienen kann.