Laborprojekt
Regelung eines invertierten Pendels mittels Echtzeitbildverarbeitung
Ein invertiertes Pendel, welches instabil ist und permanent umzufallen droht, wird mittels einer schnellen Kamera "beobachtet". Durch geeignete Ansteuerung eines fahrbaren Wagens wird der Pendel in seiner senkrechten Lage gehalten und ständig ausbalanciert.
Für dieses Vorhaben war eine schnelle Kamera notwendig und es waren insbesondere folgende Aufgaben zu lösen:
- schnelle Lokalisation des Pendels sowie eine Erfassung seines Bewegungszustandes aus den Kamerabildern;
Dadurch ergibt sich eine höhere Totzeit als bei Erfassung durch analoge Sensoren; - Entwurf der Regelstrecke auf Basis eines PID-Reglers;
- Implementation der Software unter Einbeziehen der schnellen Bildaufnahme und des DA-Wandlers zur Ansteuerung des Wagens;
- Anpassung des Linux-Treibers an die neue Kamera;
Weitere Arbeiten konzentrieren sich nun auf folgende Aspekte:
- Modularisierung und Generalisierung der Software-Architektur
- Umsetzung und Vergleich anderer Regelungsverfahren
- Steigerung der Robustheit der Bildverarbeitung bzgl. stark schwankenden äußeren Beleuchtungen
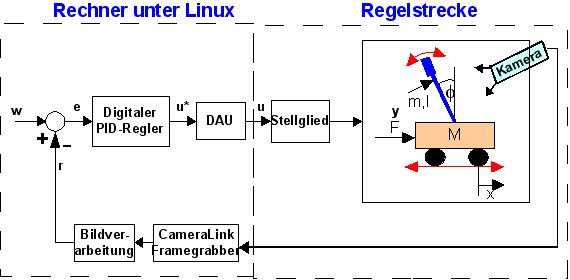
Regelanordnung:
Versuchsaufbau:
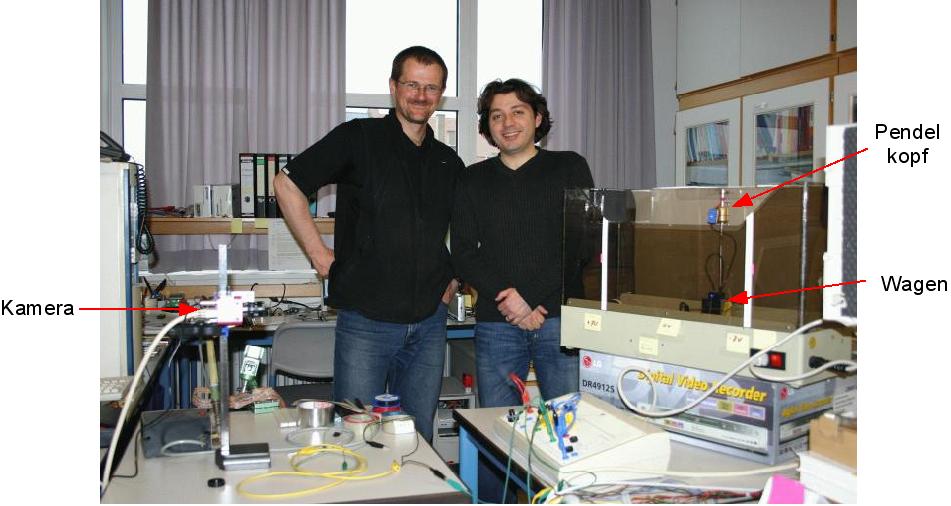
Die Projektierung "Regelung eines invertierten Pendels mit Linux-PC und kamerabasierter Bildauswertung der Regelstrecke" wurde von Herr Zupanc (links im Bild ) umgesetzt. Ein unabhängiges Parallelprojekt war die Diplomarbeit von Herrn Caliskan ( rechts im Bild): "Diskrete Pendelregelung auf Linux Ebene mit elektrischer Sensorwerterfassung".
Dynamik des Systems:
Die folgende Sequenz zeigt die Dynamik des Pendels. Zu Anfang ist der Pendel ungeregelt, und nach Einschalten ist er dann ausgeregelt:
